 by
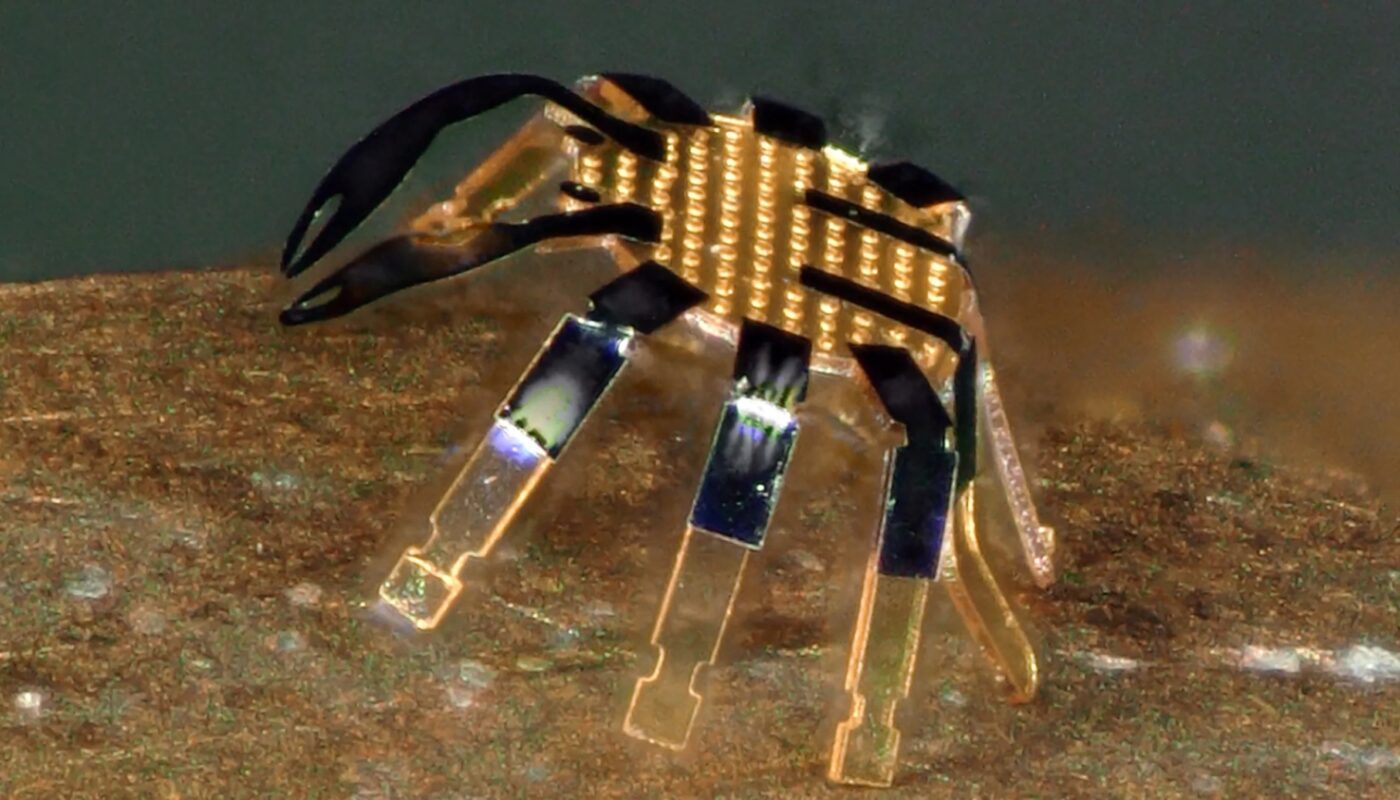
by Insect-inspired robots, including a mini-bug and a water strider, have been created by researchers at Washington State University. These micro-robots are known to be the smallest, lightest, and fastest fully functional robots of their kind. The mini-bug weighs eight milligrams, while the water strider weighs 55 milligrams, and both are capable of moving at a speed of six millimeters per second.
These miniature robots have the potential to be used in various fields such as artificial pollination, search and rescue, environmental monitoring, micro-fabrication, and robotic-assisted surgery. The research was presented at the IEEE Robotics and Automation Society’s International Conference on Intelligent Robots and Systems.
While the micro-robots developed by the researchers are faster than other robots of their size, they still lag behind their biological counterparts in terms of speed. For instance, an ant, which typically weighs up to five milligrams, can move at a speed of almost a meter per second.
The key to these tiny robots lies in their actuators, which enable their movement. The lead author of the study, Conor Trygstad, used a novel fabrication technique to miniaturize the actuator to less than a milligram, making it the smallest actuator ever created.
According to Néstor O. Pérez-Arancibia, Flaherty Associate Professor in Engineering at WSU’s School of Mechanical and Materials Engineering, these actuators are also the smallest and fastest ever developed for micro-robotics.
The actuator is made of a shape memory alloy, which is capable of changing shape when heated. Unlike traditional motors, these alloys do not have any moving or spinning components. Trygstad explains that the shape memory alloys are mechanically sound, and their miniaturization opens up new possibilities in the field of micro-robotics.
Shape memory alloys are typically unsuitable for large-scale robotic movement due to their slow response time. However, the actuators in the WSU robots consist of two tiny shape memory alloy wires that are just 1/1000 of an inch in diameter. With a small current, these wires can be heated and cooled quickly, allowing the robots to flap their fins or move their feet up to 40 times per second. In initial tests, the actuator was able to lift over 150 times its own weight.
One advantage of the SMA technology is that it requires minimal electricity or heat to operate, making the robots more energy-efficient. Trygstad states that the SMA system can be powered by less-sophisticated systems.
Trygstad, who is an avid fly fisherman, has observed water striders and hopes to further study their movements. While the WSU water strider robot moves by flapping its fins, the natural insect uses a more efficient rowing motion with its legs, allowing it to move much faster.
The researchers aim to develop a water strider-type robot that can move not only on the water surface but also beneath it. They are also exploring the use of tiny batteries or catalytic combustion to make the robots fully autonomous and untethered from a power supply.
Note:
1. Source: Coherent Market Insights, Public sources, Desk research
2. We have leveraged AI tools to mine information and compile it